月面步行者

{kind=link}
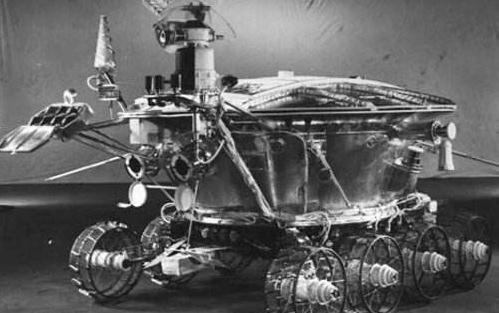
月面步行者是前苏联在1969年至1977年间所进行的机器人登陆月球漫游计划[1]。1969年的月面步行者1A 在发射中被毁,1970年的月面步行者1号和1973年的月面步行者2号登陆月球,而1977年的月面步行者未发射。成功的任务包括Zond和月球系列计划的飞越、轨道飞行器和登陆。月面步行者的设计主要是支援苏联载人月球任务和使用自动的远端遥控机器人探测表面和传回图片。月面步行者是使用质子火箭发射,由月球太空船运送到月球的表面。月球步行者的登陆部分和从月球带回标本任务的登月部分类似。月面步行者是由NPO Lavochkin的Alexander Kemurdjian 设计的。直到1997年才有火星探路者成为另一艘在其它星球上的遥控车。
目录
发展
月球车原本的主要任务是勘察日后载人登陆和月球基地的地点,目的是将太空船建立成为无线电信标,让载人太空船能够精确的登陆月球。同时,这艘太空船的设计是当登陆失败时,只要一位太空人就能从主要的LK登陆点移动至备用的LK登陆点。替代的,在阿波罗太空人登陆月球成功之后,它被用于月球表面的远端遥控探测。
在1968中期,在靠近辛菲罗波尔附近一个隐密的山谷村庄Shkolnoye(ru:Школьное (Крым))建立了月球基地,KIP-10或NIP-10(КИП-10或НИП-10)。它涵盖的面积达到一公顷(120米 X 70米),并且与月球表面的一些地区非常相似。它使用了超过3,000立方米的土壤来建造,包括54个直径达到16米的环形山和大约160大小不同的石块。整个地区被漆成灰色和黑色的砖块包围着,以便于分析问题和月面车的底盘。
月球车1A
经过多年秘密发展的工程和训练,第一辆月球车1A于1969年2月19日发射。但仅仅几秒钟火箭就解体,第一辆月球车就报销了。世界其它各地在多年之后才能够评估火箭的酬载。
月球车1号
在原始的月球车被毁坏之后,苏联工程师立即开始建造另一辆月球车。月球车1号是前苏联的月球车计划中两艘成功降落在月球上的无人月球巡视车中的第一辆,它是由月球17号携带到月球的。月球车1号[2]也是在另一个世界上巡回的第一个遥控机器人。
月球17号是在1970年11月10日14:44:01(世界时)发射的。在抵达地球的泊接轨道之后,月球17号在1970年11月10日14:54(世界时)点燃最后阶段的火箭进入前往月球的轨道。经过两次的航向修正(11月12日和14日),它在1970年11月15日22:00(世界时)进入月球轨道。
这艘太空船在1970年11月17日03:47(世界时)在月球的雨海软着陆,登陆艇利用双弦梯将酬载,月球车1号,放下到月球的表面,在06:28(世界时)这辆漫游车移动到了月球的表面。
为了要在真空的环境下工作,包覆在压力容器内的机械零件和电动马达(在每一个轮子的衬套)都使用一种特殊的氟基润滑剂。
漫游车只在月球的白天工作,偶尔会停下来让太阳能电池充电;在夜晚,漫游车进入休眠状态,靠着放射性同位素加热器维持温度,直到第二天的日出。
月球车3号
月球车3号是在1977年建造的月球漫游车,但是因为缺乏经费和发射器而不可能前往月球。它保存在非营利组织的拉沃奇金博物馆供人参观。
成果
月球车1号运作了322个地球日,和传送回20,000张电视影像与206张高解析全景相。另外,它使用RIFMA X-射线萤光分光仪执行了25次土壤分析和使用透度计测量了500个不同的地点。
月球车2号运作了大约4个月,走过了37公里 (23英里)的表面地形,包括丘陵旱地和沟纹,并且是目前留置在月球上且在月面上旅行得最远的外星漫游车。在这段时间,它送回了86幅全景的影像和超过80,000电视画面。许多表面的机械测试、激光测距的测量、和完成其它的实验。
和NASA相似大小的火星探测漫游者,精神号和机会号做一个比较,它们在2009年1月迈入第五周年,总共旅行了21公里 (13英里) 和传送回125,000张影像。
视频
月面步行者 相关视频
参考文献
- ↑ NASA公布中型月球着陆器概念 为月球漫游车任务提供支持 ,搜狐,2019-11-29
- ↑ 月球车1号,环球网