月面步行者

{kind=link}
月面步行者是前蘇聯在1969年至1977年間所進行的機器人登陸月球漫遊計劃[1]。1969年的月面步行者1A 在發射中被毀,1970年的月面步行者1號和1973年的月面步行者2號登陸月球,而1977年的月面步行者未發射。成功的任務包括Zond和月球系列計劃的飛越、軌道飛行器和登陸。月面步行者的設計主要是支援蘇聯載人月球任務和使用自動的遠端遙控機器人探測表面和傳回圖片。月面步行者是使用質子火箭發射,由月球太空船運送到月球的表面。月球步行者的登陸部分和從月球帶回標本任務的登月部分類似。月面步行者是由NPO Lavochkin的Alexander Kemurdjian 設計的。直到1997年才有火星探路者成為另一艘在其它星球上的遙控車。
目錄
發展
月球車原本的主要任務是勘察日後載人登陸和月球基地的地點,目的是將太空船建立成為無線電信標,讓載人太空船能夠精確的登陸月球。同時,這艘太空船的設計是當登陸失敗時,只要一位太空人就能從主要的LK登陸點移動至備用的LK登陸點。替代的,在阿波羅太空人登陸月球成功之後,它被用於月球表面的遠端遙控探測。
在1968中期,在靠近辛菲羅波爾附近一個隱密的山谷村莊Shkolnoye(ru:Школьное (Крым))建立了月球基地,KIP-10或NIP-10(КИП-10或НИП-10)。它涵蓋的面積達到一公頃(120米 X 70米),並且與月球表面的一些地區非常相似。它使用了超過3,000立方米的土壤來建造,包括54個直徑達到16米的環形山和大約160大小不同的石塊。整個地區被漆成灰色和黑色的磚塊包圍着,以便於分析問題和月面車的底盤。
月球車1A
經過多年秘密發展的工程和訓練,第一輛月球車1A於1969年2月19日發射。但僅僅幾秒鐘火箭就解體,第一輛月球車就報銷了。世界其它各地在多年之後才能夠評估火箭的酬載。
月球車1號
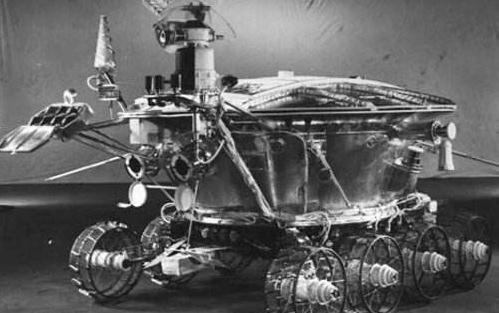
在原始的月球車被毀壞之後,蘇聯工程師立即開始建造另一輛月球車。月球車1號是前蘇聯的月球車計劃中兩艘成功降落在月球上的無人月球巡視車中的第一輛,它是由月球17號攜帶到月球的。月球車1號[2]也是在另一個世界上巡迴的第一個遙控機器人。
月球17號是在1970年11月10日14:44:01(世界時)發射的。在抵達地球的泊接軌道之後,月球17號在1970年11月10日14:54(世界時)點燃最後階段的火箭進入前往月球的軌道。經過兩次的航向修正(11月12日和14日),它在1970年11月15日22:00(世界時)進入月球軌道。
這艘太空船在1970年11月17日03:47(世界時)在月球的雨海軟着陸,登陸艇利用雙弦梯將酬載,月球車1號,放下到月球的表面,在06:28(世界時)這輛漫遊車移動到了月球的表面。
為了要在真空的環境下工作,包覆在壓力容器內的機械零件和電動馬達(在每一個輪子的襯套)都使用一種特殊的氟基潤滑劑。
漫遊車只在月球的白天工作,偶爾會停下來讓太陽能電池充電;在夜晚,漫遊車進入休眠狀態,靠着放射性同位素加熱器維持溫度,直到第二天的日出。
月球車3號
月球車3號是在1977年建造的月球漫遊車,但是因為缺乏經費和發射器而不可能前往月球。它保存在非營利組織的拉沃奇金博物館供人參觀。
成果
月球車1號運作了322個地球日,和傳送回20,000張電視影像與206張高解析全景相。另外,它使用RIFMA X-射線螢光分光儀執行了25次土壤分析和使用透度計測量了500個不同的地點。
月球車2號運作了大約4個月,走過了37公里 (23英里)的表面地形,包括丘陵旱地和溝紋,並且是目前留置在月球上且在月面上旅行得最遠的外星漫遊車。在這段時間,它送回了86幅全景的影像和超過80,000電視畫面。許多表面的機械測試、激光測距的測量、和完成其它的實驗。
和NASA相似大小的火星探測漫遊者,精神號和機會號做一個比較,它們在2009年1月邁入第五周年,總共旅行了21公里 (13英里) 和傳送回125,000張影像。
視頻
月面步行者 相關視頻
參考文獻
- ↑ NASA公布中型月球着陸器概念 為月球漫遊車任務提供支持 ,搜狐,2019-11-29
- ↑ 月球車1號,環球網