适时四驱
| 适时四驱 |
 |
|
中文名:适时四驱 别 名:实时四驱 系 统:四驱模式 载 体:汽车 |
适时四驱只有在适当的时候才会转换为四轮驱动,而在其它情况下仍然是两轮驱动的驱动系统。系统会根据车辆的行驶路况自动切换为两驱或四驱模式,不需要人为操作。
适时四驱有别于需要手动切换两驱和四驱的分时四驱,以及所有工况下都是四轮驱动的全时四驱。[1]
目录
诞生背景
汽车的每个驱动轮之间都必须有差速器才能实现高附着路面上的转弯,这是因为不同车轮在转弯时的转速不同导致的,差速器就是消除这种转速差速的部件,全时四驱就是基于这个理念而诞生的,它的中央差速器的作用就是完成消除前后轴转速差的工作,因此它可以实现任何时候都保证四轮驱动。分时四驱是不能实现在四驱状态下公路过弯的,因为它没有中央差速器,因此它只能在越野的时候手动切换为适时模式,常规情况下只能采用两轮驱动。当在市场上认为全时四驱结构过于复杂,许多车型不方便布置,而且传动率不够高;而分时四驱需要手动切换很麻烦,同时对驾驶员的技术要求很高,无法做到更广泛普及的时候,可以自动切换两驱和四驱的适时四驱技术就应运而生了。
发展沿革
适时四驱诞生开始,发展大致经历了三个阶段,每个阶段的构造和性能都有所区别。早期由于适时四驱的技术有限,采用适时四驱的车型确实无法和全时四驱相比,无论在通过性还是操控极限方面,它的性能都只能介于两驱和全时四驱之间。随着适时四驱技术的进步,第三代适时四驱性能获得了大幅度的提升,其工作原理也有了很大的改变。
第一代
早期的适时四驱是纯机械的,最典型的代表车型就是本田的CR-V,它通过液力耦合器来实现自动向后轮分配动力。这种适时四驱的结构比较简单,不需要电控元件,但由于它需要前后车轮出现明显转速差的时候液力耦合器才能介入,因此它的响应速度比较慢,无论是在提高越野性能还是通过性能的时候,都会明显逊色于全时四驱。
第二代
第二代适时四驱开始通过电子装备来解决之前机械式带来的问题。在这一代适时四驱中,中央差速装置被多片式离合器所取代,它的开与合则由ECU来掌控。前后车轮的轮速传感器会将实时的轮速反馈给ECU,一旦ECU检测到前轮的转速比后轮快,就会迅速发出指令给多片式离合器,从而向后轴传递动力。由于有了电控系统的加入,此时的适时四驱在响应速度上大幅度提高,而且在分配动力比例上,也可以做到智能化控制。另外多片离合器在完全结合时可以达到硬连接的效果,因此不仅它的传动效率要比机械式的更高,而且使得锁死差速装置成为可能。
第三代
第三代适时四驱是以欧洲新款适时四驱车型采用的,以第三代HALDEX四驱为代表的智能电子式适时四驱。这种适时四驱增加了预载功能,可以通过前轮的运转情况来实现预判断,在前轮有打滑趋势之前就预先接通,理论上已经做到与全时四驱类似的效果。另外这种适时四驱还可以做到正常行驶情况下,前后轴之间的动力分配恒定在90:10。
系统分类
第一种是以机械的粘性联轴节式适时四驱,第二种是电控多片离合器式适时四驱;第三种是智能电子式适时四驱。
机械联轴式
这种四驱的核心部件是液力耦合器,在这个耦合器中充满了硅油,输入轴和输出轴一端与浸没在硅油中的叶轮相连,另一端则与前后差速器相连。在正常行驶的时候,前后车轮保持相同的速度运转,液力耦合器的两个轴之间不存在转速差。当前轮出现打滑的时候,转速会超过后轮,从而导致耦合器里的两个叶轮之间出现转速差,这种转速差会导致硅油升温而粘度迅速升高,从而将动力传递给后轮。
多离合器式
这种适时四驱的核心部件是多片离合器式限滑差速器。多片离合器式差速器主要是通过湿式离合片产生差动扭矩,而离合器的压紧与分离是靠电子系统来控制的。车辆在正常行驶时,驱动形式为前驱,如当系统检测到车轮打滑时,通过电子系统控制离合器压紧,进而将部分动力传递至后轮,理论上电脑会根据车速与路况自动分配前后轴扭矩,以达到抓地性能最优化。不过这种四驱系统通常在主驱动轮失去抓地力(打滑)后,另外的驱动轮才会被动介入,所以它的响应速度较慢。
智能电子式
这种适时四驱可以根据车轮打滑或转向信息,精确控制智能分动器向四轮传递出大小可控的扭矩,提高整车加速性、稳定性和燃油经济性。在停车时,传递给前轮扭力非常低或为零,提高了操作的便利和舒适性。在ABS工作时,短时间内迅速切断前轮动力传递,确保刹车时整车的稳定性。加速时,在四个轮上实现最大的牵引力,加速性更好。在湿滑路面上时,与其他安全系统通讯,实现最佳的牵引力和安全性能。
优劣对比
优点
相比全时四驱,适时四驱的结构要简单得多,这不仅可以有效的降低成本,而且也有利于降低整车重量。由于适时四驱的特殊结构,它更适合于前横置发动机前驱平台的车型配备,这使得许多基于这种平台打造的SUV或者四驱轿车有了装配四驱系统的可能。前驱平台相对于后驱平台更有利于拓展车内空间、传动效率更高、传动系统的噪音更小。这些优点对于小型SUV,特别是是发动机排量较小的SUV来说显得尤其重要。
由于全时四驱的结构复杂,传动部件多而重,会极大地降低动力的响应性,如果小排量发动机装备全时四驱,会明显感觉得到功力不足。不仅如此,由于全时四驱的功耗大,显著影响了汽车的经济性,而适时四驱可以很好地兼顾经济性。
缺点
适时四驱也存在缺点,绝大多数适时四驱在前后轴传递动力时,会受制于结构本身的缺陷,无法将超过50%以上的动力传递给后轴。相对来说,适时四驱车的主动安全性不如全时驱动车高。另外,适时四驱系统的前后轴基本上都采用开放式差速器,如在一些复杂路段,出现单侧两个车轮打滑时,也是无法脱困的。所以这种四驱系统无法应对强度大的越野路段。
使用车系
全球采用适时四驱技术的车型大致有两大分支:一是以采用瑞典HALDEX公司提供的四驱为代表的欧系车,如大众的途观、帕萨特R36、高尔夫R20、奥迪的TT3.2quttro、A3quttro,福特德国的KUGA,路虎的神行者2等等;另一分支则是以日本JECKT公司提供的四驱为代表的日系车,像丰田的RAV4和汉兰达等等。
分类
目前,四驱汽车的驱动系统一般分为:分时四驱、全时四驱和适时四驱。
分时四驱是由驾驶者手动切换的驱动模式,驾驶者可通过接通或断开分动器来选择两轮驱动或四轮驱动模式。这是SUV车型中最常见的驱动模式,其优点是既能保证车辆的动力性和通过性,又能兼顾燃油经济性,略显不足的是驾驶者需要自行判断路况,手动操作驱动模式。
全时四驱指的是车辆在整个行驶过程中一直保持四轮驱动的模式。这种驱动模式拥有较好的越野和操控性能,但它不能根据路面情况做出扭矩分配的调整,油耗偏大,经济性差。
适时四驱又称为实时四驱,是最近几年发展起来的技术,它由电脑芯片控制两驱与四驱的切换。该系统的显著特点就是它在继承全时四驱和分时四驱的优点的同时弥补了它们的不足。它能自行识别驾驶环境,根据驾驶环境的变化控制两驱与四驱两种模式的切换。在颠簸、多坡多弯等附着力低的路面,车辆自动设定为四轮驱动模式,而在城市路面等较平坦的路况上,车辆会自行切换为两轮驱动。
系统比较
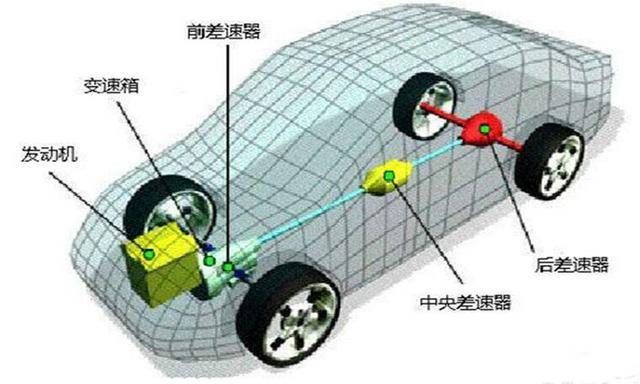
全时四驱系统内有三个差速器:除了前后桥各有一个差速器外,在前后驱动轴之间还有一个中央差速器。这使全时四驱避免了半时四驱的固有问题:汽车在转向时,前后轮的转速差会被中央差速器吸收。所以,全时四驱在硬路面、下雨时有更可靠的四轮抓着力,比分时四驱优越。但到了冰雪、沼泽地就必须把中央差速器锁上;回到不滑的硬路,马上要把中央差速器锁解开。
有些全时四驱的中央差速器比较先进,一般情况下它可以把汽车动力平分给前后轴。当车轮出现打滑时,它会自动把中央差速器锁上。这种系统在小车上表现很好,但在大四驱车上,它就没有差速器手动锁来得可靠。
相比全时四驱,适时四驱的结构要简单得多,这不仅可以有效也降低成本,而且也有利于降低整车重量。由于适时四驱的特殊结构,它更适合于前横置发动机前驱平台的车型配备,这使得许多基于这种平台打造的SUV或者四驱轿车有了装配四驱系统的可能。前驱平台相对于后驱平台本身就有着诸多优势,如更有利于拓展车内空间、传动效率更高、传动系统的噪音更小等等。这些优点对于小型SUV,特别是是发动机排量较小的SUV来说显得尤其重要。当然,适时四驱的缺点仍然是存在的,目前绝大多数适时四驱在前后轴传递动力时,会受制于结构本身的缺陷,无法将超过50%以上的动力传递给后轴,这使它在主动安全控制方面,没有全时四驱的调整范围那么大;同时相比分时四驱,它在应对恶劣路面时,四驱的物理结构极限偏低。
分时四驱靠操作分动器实现两驱与四驱的切换。由于分动器内没有中央差速器,所以分时四轮驱动的汽车不能在硬地面上使用四驱,特别是在弯道上不能顺利转弯。这是因为分时四驱在分动器内没有中央差速器,而无法把前后轴的转速调整所致。汽车转向时,前轮转弯半径比同侧的后轮要大,因此前轮的转速要比后轮快,以至四个车轮走的路线完全不一样,所以分时四驱只可以在车轮打滑时才挂上四驱,一回到摩擦力大的铺装路面应马上改回两驱。
5分钟看懂:什么是全时、适时、分时四驱?
参考资料
- ↑ 常见的四驱形式有哪些,汽车之家