「三角测量」修訂間的差異檢視原始碼討論檢視歷史
| (未顯示同一使用者於中間所作的 2 次修訂) | |||
| 行 1: | 行 1: | ||
| + | [[File:三角测量.jpeg|有框|右|<big>三角测量</big>[https://pic3.zhimg.com/80/b7fc5433b580bfa32722e4e069c28b95_720w.jpg?source=1940ef5c 原图链接][https://www.zhihu.com/question/27719009?sort=created 来自 知乎 的图片]]] | ||
| + | |||
'''三角测量'''在[[三角学]]与[[几何学]]上是一借由测量目标点与固定基准线的已知端点的角度,测量目标距离的方法。而不是直接测量特定位置的距离(三边量测法)。当已知一个边长及两个观测角度时,观测目标点可以被标定为一个三角形的第三个点。 | '''三角测量'''在[[三角学]]与[[几何学]]上是一借由测量目标点与固定基准线的已知端点的角度,测量目标距离的方法。而不是直接测量特定位置的距离(三边量测法)。当已知一个边长及两个观测角度时,观测目标点可以被标定为一个三角形的第三个点。 | ||
| − | 三角量测亦可意指为超大三角形系统的精确测量,称作三角量测网络。这源自于威理博·司乃耳于1615-17的作品,他展现出一个点如何能够从附属于三个已知点的角度来被定位,是在新的一未知点上量测而不是在先前固定的点上,这样的问题叫做重新区块化。调查误差可被最小化,当大量三角形已建立在最大适当的规模。借此参考方法,所有在三角内的点皆可被准确地定位。直至1980年代[[全球卫星导航系统]]崛起之前,此三角量测方法被用来准确化大规模的土地测量。 | + | 三角量测亦可意指为超大三角形系统的精确测量,称作三角量测网络。这源自于威理博·司乃耳于1615-17的作品,他展现出一个点如何能够从附属于三个已知点的角度来被定位,是在新的一未知点上量测而不是在先前固定的点上,这样的问题叫做重新区块化。调查误差可被最小化,当大量三角形已建立在最大适当的规模。借此参考方法,所有在三角内的点皆可被准确地定位。直至1980年代[[全球卫星导航系统]]崛起之前,此三角量测方法被用来准确化大规模的土地测量<ref>[https://blog.csdn.net/heroybc/article/details/106356148 三角测量与PNP],CSDN, 2020-05-26 </ref> 。 |
==应用== | ==应用== | ||
| − | 光学3D量测系统亦使用这个原理来定义一个物体的空间维度及几何形状。基本上,此构造包含两个[[感测器]]以量测物体。其中一个感测器主要是一个数位摄影装置,另一个则可以是[[摄影机]]或光投影机。这两个感测器的中心点以及对焦于物体表面的同一点,形成一个空间上的三角。于此三角形内,两感测器间的距离是一必须是已知的基准值。借由找出两感测器投射线与[[基准线]]间的夹角,便可用三角测量法得知两投[[射线]]交点的3D座标。 | + | 光学3D量测系统亦使用这个原理<ref>[https://www.sohu.com/a/210928235_693868 结构光测量之三角测量原理及光学三角法知识点总结] ,搜狐,2017-12-16</ref> 来定义一个物体的空间维度及几何形状。基本上,此构造包含两个[[感测器]]以量测物体。其中一个感测器主要是一个数位摄影装置,另一个则可以是[[摄影机]]或光投影机。这两个感测器的中心点以及对焦于物体表面的同一点,形成一个空间上的三角。于此三角形内,两感测器间的距离是一必须是已知的基准值。借由找出两感测器投射线与[[基准线]]间的夹角,便可用三角测量法得知两投[[射线]]交点的3D座标。 |
==基于两固定角度之距离量测== | ==基于两固定角度之距离量测== | ||
| 行 12: | 行 14: | ||
以下公式应用于平面或[[欧几里得几何]]上。如果量测距离远到会受地球曲度的影响,这些公式将变得不准确,但可使用[[球面三角学]]推导出的复杂式子来取代。 | 以下公式应用于平面或[[欧几里得几何]]上。如果量测距离远到会受地球曲度的影响,这些公式将变得不准确,但可使用[[球面三角学]]推导出的复杂式子来取代。 | ||
| + | |||
| + | ==视频== | ||
| + | ===<center> 三角测量 相关视频</center>=== | ||
| + | <center>全站仪三角高程测量-全站仪高程测量</center> | ||
| + | <center>{{#iDisplay:b0525gh75vn|560|390|qq}}</center> | ||
| + | |||
| + | <center>海洋学家:或可运用三角测量法计算坠机地点</center> | ||
| + | <center>{{#iDisplay:l00178xokec|560|390|qq}}</center> | ||
| + | |||
| + | ==参考文献== | ||
[[Category:310 數學總論]] | [[Category:310 數學總論]] | ||
於 2020年8月27日 (四) 04:56 的最新修訂

{kind=link}
三角測量在三角學與幾何學上是一藉由測量目標點與固定基準線的已知端點的角度,測量目標距離的方法。而不是直接測量特定位置的距離(三邊量測法)。當已知一個邊長及兩個觀測角度時,觀測目標點可以被標定為一個三角形的第三個點。
三角量測亦可意指為超大三角形系統的精確測量,稱作三角量測網絡。這源自於威理博·司乃耳於1615-17的作品,他展現出一個點如何能夠從附屬於三個已知點的角度來被定位,是在新的一未知點上量測而不是在先前固定的點上,這樣的問題叫做重新區塊化。調查誤差可被最小化,當大量三角形已建立在最大適當的規模。藉此參考方法,所有在三角內的點皆可被準確地定位。直至1980年代全球衛星導航系統崛起之前,此三角量測方法被用來準確化大規模的土地測量[1]。
應用
光學3D量測系統亦使用這個原理[2]來定義一個物體的空間維度及幾何形狀。基本上,此構造包含兩個感測器以量測物體。其中一個感測器主要是一個數位攝影裝置,另一個則可以是攝影機或光投影機。這兩個感測器的中心點以及對焦於物體表面的同一點,形成一個空間上的三角。於此三角形內,兩感測器間的距離是一必須是已知的基準值。藉由找出兩感測器投射線與基準線間的夾角,便可用三角測量法得知兩投射線交點的3D座標。
基於兩固定角度之距離量測
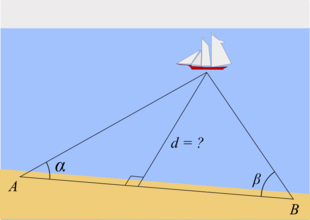
假設一量測目標點及兩個已知座標的參考點可形成一個三角形,則藉由計算三角形其中參考邊的長度,量測兩參考點與目標點形成的角度,即可找出目標點的距離及座標。
以下公式應用於平面或歐幾里得幾何上。如果量測距離遠到會受地球曲度的影響,這些公式將變得不準確,但可使用球面三角學推導出的複雜式子來取代。
視頻
三角測量 相關視頻
參考文獻
- ↑ 三角測量與PNP,CSDN, 2020-05-26
- ↑ 結構光測量之三角測量原理及光學三角法知識點總結 ,搜狐,2017-12-16