無人庫區物料三維掃描識別及定位檢測技術
 |
無人庫區物料三維掃描識別及定位檢測技術在工業4.0的智能工廠的趨勢下,鋼鐵生產企業正逐漸從半自動化生產向全自動化生產過渡。作為鋼卷物流自動化[1]智能改造的重要組成部分,鋼卷自動裝卸過程中,鋼卷和垛位的自動檢測和定位技術具有重要意義。
目錄
案例應用場景/領域
智能倉儲
主要技術內容
1.技術背景和意義
在工業4.0的智能工廠的趨勢下,鋼鐵生產企業正逐漸從半自動化生產向全自動化生產過渡。作為鋼卷物流自動化智能改造的重要組成部分,鋼卷自動裝卸過程中,鋼卷和垛位的自動檢測和定位技術具有重要意義。在半自動階段的裝卸作業階段,裝卸工作主要依靠工作人員在地面不斷對行車進行指導,危險性高,人力成本高,且工作效率低。為實現出入庫作業的無人化,本系統設計了一種利用三維激光進行掃描定位的方法,從而實現了對鋼卷和垛位自動識別和精準定位。
2.技術要點和優勢:
技術原理:鋼卷和垛位的三維掃描識別和定位技術主要通過安裝在庫區頂部的激光掃描儀,在雲台的轉動下,對下方的地面、卡車、鋼卷及垛位進行掃描。將掃描獲得的激光深度數據、激光角度數據和雲台轉動的角度數據進行空間幾何計算,得到地面三維坐標系中被掃描物體的三維坐標,即三維點雲數據。再利用各濾波等數據處理,消除環境和設備安裝帶來的誤差,提高點雲數據的精度。系統根據RANSAC算法對點雲進行平面模型配准,獲得車廂平面並分離出平面內點,然後獲得只包含鋼卷或鞍座的有效點雲,再此基礎上通過邊緣檢測與Meanshift聚類分割算法將粘連的多個鋼卷點雲團分割為單個獨立的鋼卷點雲數據。再通結合多尺度特徵提取方法的Pointnet神經網絡對鋼卷點雲進行分類,利用多尺度網絡特徵提取,最終計算出鋼卷中心位置和垛位的位置信息,發送給控制系統,調度行車進行鋼卷的自動裝卸。技術要點:1、 三維點雲數據的還原;2、 被識別物體的點雲聚類分割;3、 被識別物體的特徵提取和識別;實施關鍵:1、 高精度雲台;2、 安裝參數的校準;3、 識別物體特徵模型的配准;技術優勢:1、 自主研發的高精度雲台和安裝參數自動校準技術,獲得高精度點雲數據;2、 利用多尺度網絡特徵提取,增強了Pointnet網絡對於點雲局部特徵信息的提取能力,具備在複雜環境中對鋼卷和垛位分類識別精度;
技術應用情況
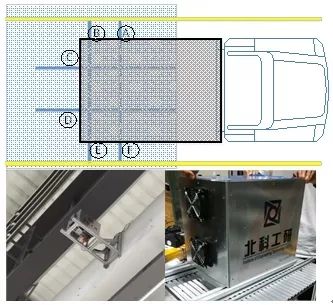
本技術成功應用於沙鋼冷軋原料庫,主要內容如下:原料庫整個庫區長180m,寬80m,整個庫區包含2個跨、5台行車、2套上料步進梁、1台過跨車、4個裝卸車位以及3600個左右的垛位。利用無人庫區物料三維掃描識別及定位檢測技術,在四個裝卸車位都進行了智能無人裝卸的改造。自2020年6月成功投運以來,配合庫區智能調度系統,實現了鋼卷裝卸過程的無人化。鋼卷和垛位單次掃描定位時間小於30s,利用行車運行過程時間進行掃描定位,極大的提高了整個系統的運行效率。同時,定位精度小於5厘米,實現整個鋼卷裝卸過程的精準定位,鋼卷裝卸過程無碰撞損傷,降低了鋼卷的損壞率和設備的故障率。整個減少庫區人員3-4名,減少人員費用支出、降低人員傷亡風險。激光掃描儀[2]的識別定位不依賴可見光,減少庫區照明90%以上,每年節省電費達到60萬元。
參考文獻
- ↑ 淺談自動化行業未來的發展 ,搜狐,2021-01-11
- ↑ 三維激光掃描儀的工作原理和六大技術特點 ,搜狐,022-01-19