无人库区物料三维扫描识别及定位检测技术查看源代码讨论查看历史
 |
无人库区物料三维扫描识别及定位检测技术在工业4.0的智能工厂的趋势下,钢铁生产企业正逐渐从半自动化生产向全自动化生产过渡。作为钢卷物流自动化[1]智能改造的重要组成部分,钢卷自动装卸过程中,钢卷和垛位的自动检测和定位技术具有重要意义。
案例应用场景/领域
智能仓储
主要技术内容
1.技术背景和意义
在工业4.0的智能工厂的趋势下,钢铁生产企业正逐渐从半自动化生产向全自动化生产过渡。作为钢卷物流自动化智能改造的重要组成部分,钢卷自动装卸过程中,钢卷和垛位的自动检测和定位技术具有重要意义。在半自动阶段的装卸作业阶段,装卸工作主要依靠工作人员在地面不断对行车进行指导,危险性高,人力成本高,且工作效率低。为实现出入库作业的无人化,本系统设计了一种利用三维激光进行扫描定位的方法,从而实现了对钢卷和垛位自动识别和精准定位。
2.技术要点和优势:
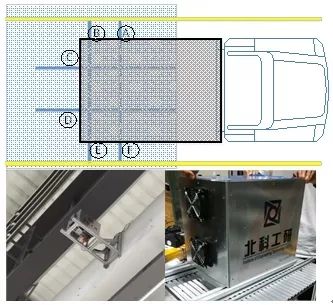
技术原理:钢卷和垛位的三维扫描识别和定位技术主要通过安装在库区顶部的激光扫描仪,在云台的转动下,对下方的地面、卡车、钢卷及垛位进行扫描。将扫描获得的激光深度数据、激光角度数据和云台转动的角度数据进行空间几何计算,得到地面三维坐标系中被扫描物体的三维坐标,即三维点云数据。再利用各滤波等数据处理,消除环境和设备安装带来的误差,提高点云数据的精度。系统根据RANSAC算法对点云进行平面模型配准,获得车厢平面并分离出平面内点,然后获得只包含钢卷或鞍座的有效点云,再此基础上通过边缘检测与Meanshift聚类分割算法将粘连的多个钢卷点云团分割为单个独立的钢卷点云数据。再通结合多尺度特征提取方法的Pointnet神经网络对钢卷点云进行分类,利用多尺度网络特征提取,最终计算出钢卷中心位置和垛位的位置信息,发送给控制系统,调度行车进行钢卷的自动装卸。技术要点:1、 三维点云数据的还原;2、 被识别物体的点云聚类分割;3、 被识别物体的特征提取和识别;实施关键:1、 高精度云台;2、 安装参数的校准;3、 识别物体特征模型的配准;技术优势:1、 自主研发的高精度云台和安装参数自动校准技术,获得高精度点云数据;2、 利用多尺度网络特征提取,增强了Pointnet网络对于点云局部特征信息的提取能力,具备在复杂环境中对钢卷和垛位分类识别精度;
技术应用情况
本技术成功应用于沙钢冷轧原料库,主要内容如下:原料库整个库区长180m,宽80m,整个库区包含2个跨、5台行车、2套上料步进梁、1台过跨车、4个装卸车位以及3600个左右的垛位。利用无人库区物料三维扫描识别及定位检测技术,在四个装卸车位都进行了智能无人装卸的改造。自2020年6月成功投运以来,配合库区智能调度系统,实现了钢卷装卸过程的无人化。钢卷和垛位单次扫描定位时间小于30s,利用行车运行过程时间进行扫描定位,极大的提高了整个系统的运行效率。同时,定位精度小于5厘米,实现整个钢卷装卸过程的精准定位,钢卷装卸过程无碰撞损伤,降低了钢卷的损坏率和设备的故障率。整个减少库区人员3-4名,减少人员费用支出、降低人员伤亡风险。激光扫描仪[2]的识别定位不依赖可见光,减少库区照明90%以上,每年节省电费达到60万元。
参考文献
- ↑ 浅谈自动化行业未来的发展 ,搜狐,2021-01-11
- ↑ 三维激光扫描仪的工作原理和六大技术特点 ,搜狐,022-01-19