核工業機器人檢視原始碼討論檢視歷史
| 核工業機器人 |
 |
|
中文名稱: 核工業機器人 地位: 受到了世界各國的重視 技術: 使用機器人遙控作業技術 使用環境: 輻射環境 |
核工業機器人是在核電站中廣泛使用的機器人。核電站是核能利用的一個重要方面,受到了世界各國的重視。全世界核能發電量占總發電量的17%。[1]
背景資料
但是這些核電站在建造階段沒有考慮使用機器人遙控作業技術的應用,因此,現有的核電站應用機器人就必須以其定型的格局為前提,選擇合適的機器人來完成某些任務。
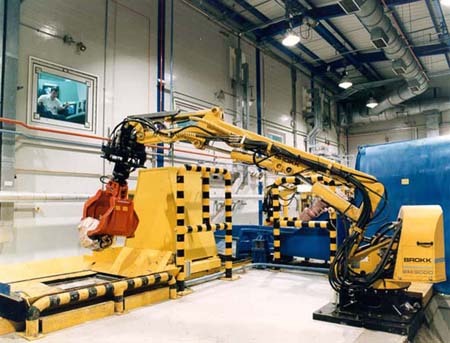
核工業機器人是應用在輻射環境下的特種機器人。機器人在這裡完成的工作不是在生產線的規定位置完成已經安排好的任務,它要完成的是位置不定的多種多樣變化的工作。
發展現狀
隨着核工業和機器人技術的發展,不少國家研製成功了真正的遠距離控制的核工業機器人。例如有美國的SAMSIN型,德國的EMSM系列,法國的MA23-SD系列等。大多數核工業機器人採用的是車輪或履帶,或車輪和履帶相結合的行走方式,只有少數的機器人採用多足或兩足行走方式。為了實現遠距離控制,核工業機器人具有各種各樣的傳感器設備。研製成功的核工業機器人一般都攜帶有照明燈,攝像機和導航設備,並且通過一根很柔軟的電線連接到它的機械手上,這樣它就可以順利的在現場行走,達到目的地。
產品特點
核工業機器人是一種十分靈活,能做各種姿態運動以及可以操作各種工具的設備,對危險環境有着極好的應變能力。一般的核工業機器人需要有這樣的幾個特點:
可靠性
機器人在核電站內進行工作時,多半是操作高放射性物質,一旦發生故障,不僅本身將受到放射性污染,而且還會造成污染範圍擴大。所以要保證核工業機器人有很強的環境適應能力和很高的可靠性,使它在工作時不會發生故障。
通用性強
核電站內的設備很多,各種管道錯綜複雜,通道狹隘,工作空間小。因此要求核工業機器人能順利通過各種障礙物和狹隘的通道,並且最好能根據需要操作不同的設備。
世界上的核工業機器人已經有幾百台了,然而這些機器人大多缺乏感知功能(如視覺,聽覺,觸覺等),手的靈巧性也不夠。對付核工業的惡劣環境影響的能力還有待提高。這些都是發展新型核工業機器人所要克服的困難。
參考來源
- ↑ 核電機器人:造福核工業的人工智能中國核網